GIS Day Final Poster
Creation of Poster’s Final Draft:
The title of our poster is “Unmanned Aerial Systems Sightings” as we didn’t want an over-explanatory title, but we didn’t want to put “UAS” in the title because the casual passersby may not know what these are. We placed both a SATT and Purdue logo on each side of the poster to associate ourselves with both. We also inserted a border around our poster that had a 14 point thickness.
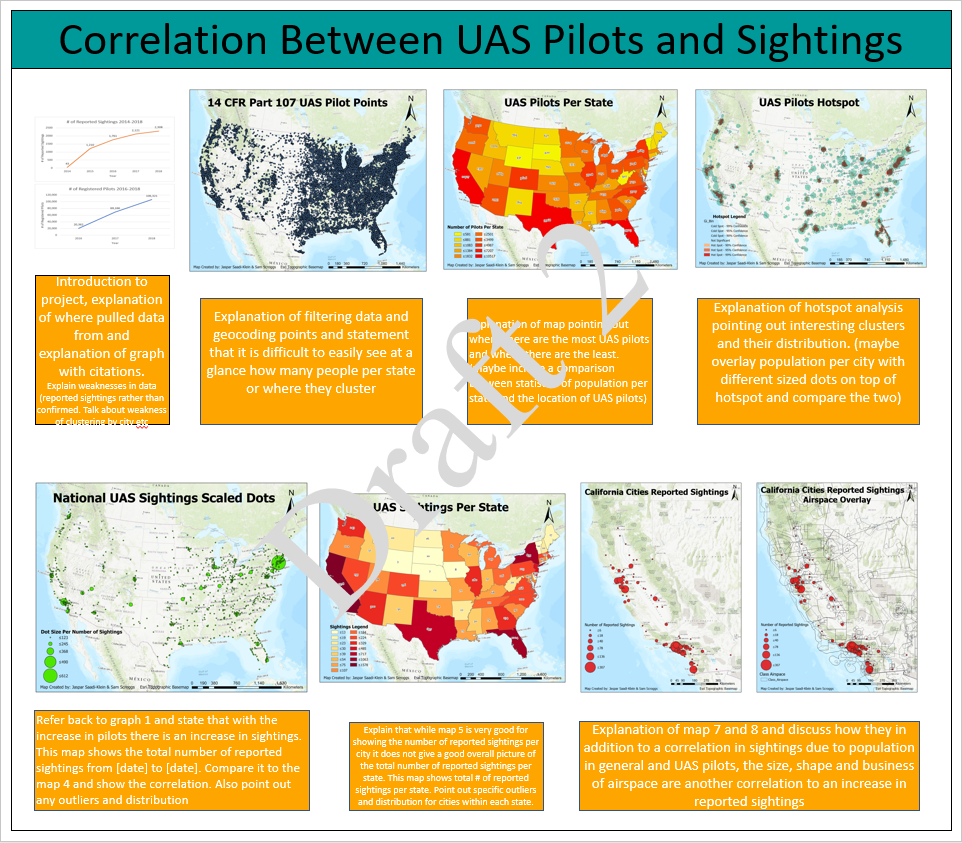
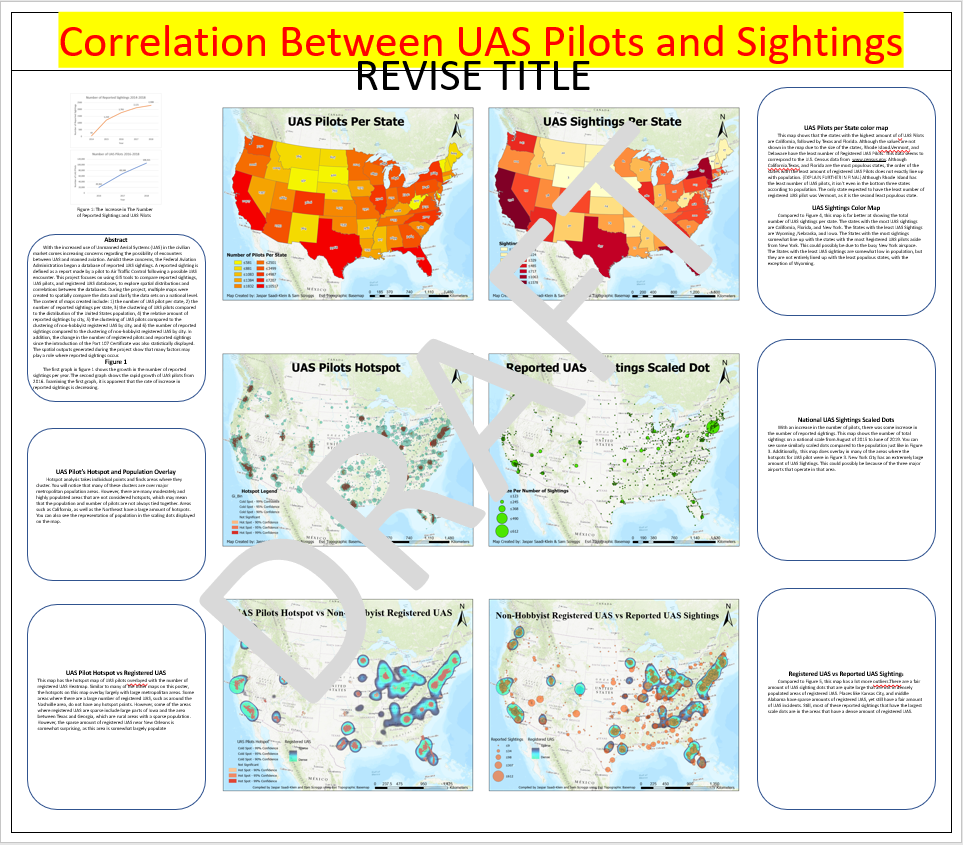
Our Abstract for this poster is a description of our project, and is meant to introduce the audience to what our project and poster is about. We put our increase of UAS sightings and pilots graph under the abstract not only so it made more visual sense, but to also help to display the idea of an increase in both pilots and incidents in the same time frame. Having these graphs also helped to begin visualizing the correlations between pilots and reported sightings. The descriptive text for this graph is put directly underneath it and talks about the correlation between the two increases. We then put in the “UAS Pilots Per State” map on the left side of our center figure column and, “Reported UAS Sightings Per State” on the right side and adjusted the color schemes to a blue/green color scheme so that they would better match the rest of our maps. Note: we are putting all figures in this poster with UAS pilot information on the left and UAS sightings on the right.
The first two maps were made to display and correlate the UAS pilots and reported sightings at a state level. This was done to talk about other things that might correlate like populations and amount of commercial airports. The text boxes for both of these maps provides information about them as well as where we obtained the data. Both text boxes are placed on the right side next to the UAS sightings map.This was done due to how much space the abstract takes up on the left side of the poster. The next two maps that were created were the “Concentrations of UAS Pilots” and “Reported UAS Sightings Per City”. These maps were created to compare where clusters of UAS pilots, high population areas, and high UAS sightings per city occurred so that they can then be discussed in their associated text boxes. The “Concentrations of UAS Pilots” text box provides information about overlap of clusters and high population areas, as well as some moderately populated areas. This text box is placed at the bottom portion of its map because the graph and its description take up all of the top half. The “Reported UAS Sightings Per City” text box describes which cities have the most sightings, as well as the correlations between population and sightings. This text box is more aligned with the top of it’s map and features two insets of New York and California so that we can discuss their high amount of sightings and high number of airports in the text box below them. The last two maps placed were the “UAS Pilots vs Locations of Registered UAS” map and “Locations of Registered UAS vs Reported UAS Sightings” map. These maps were placed at the bottom because they both discussed UAS pilots and reported sightings in comparison to registered UAS’, which we thought would best be talked about after comparing locations of pilots and sightings above, while focusing more on the heatmap comparison for each individual statistic. The text box for “UAS Pilots vs Locations of Registered UAS” talks about what a heatmap is and discusses the alignment of the hotspot and the heatmap, noting where the density of UAS pilots is high, but concentration of registered UAS are low. The text box for “Locations of Registered UAS vs Reported UAS Sightings” talks about similar correlations that were found in the last map being found in this one, as well as some small outliers that exist. It should be noted that each map and figure described in the poster has a figure number and figure title. Finally, we placed the acknowledgements at the very bottom of the poster in a smaller sized font in a lighter color to not visually distract the audience from the main aspects of the poster. Below in figure 1, you will find our final poster.
Poster Draft Comments/Critiques and How We Decided To Handle Them:
Last week, our class critiqued each group’s drafted poster. Below, you will find every comment our groups poster received, as well as how we addressed each issue.
Comment: In the title, do you know what a hotspot is. --it is a clustering-might want to say Part 107 uas pilots- or concentrations of UAS pilots then in the description mention hotspots
Our fix: We changed the map title to “ Concentrations of UAS Pilots” and the map description/discussion talks about what a hotspot map is..
Comment: Said to add figure number below
Our fix: We added figure numbers and titles below each map or figure.
Comment: Use Unmanned Aerial Systems written out rather than UAS in the title
Our fix: We changed our title to reflect this comment
Comment: In the UAS hotspot graph, does the “pilots” part reflect where they operate or where they live?
Our fix: We added text in the map description clarifying that the hotspot is for the location where part 107 pilots are registered.
Comment: Should not have the graph where it is or ave a title above the graph-maybe put the graph below .
Our fix: We moved the graph and its description below the abstract.
Comment: Seems to be a lot of really small text. Close to completion of the poster, it was suggested to change the font size from 24 to 26.
Our fix: We initially upped the descriptive text size to 24 and then decided to keep it there after the second suggestion, as the larger text causes a larger spacing issue.
Comment: Blank space needs to be filled in more, Move the title to the top of the section boxes.Add a color stripe where the titles go.
Our fix: We added more text and increased font size. All titles are above their respective sections. We removed boxes altogether for a more minimalistic feel, and we felt that the color stripe over titles would conflict with this theme.
Comment: Change the title color, make the poster purdue colored, and add SATT logo
Our fix: We added the SATT logo, but we feel that the use of a purdue color scheme would contrast horribly with the color palate we chose to use for our maps.
Comments: Border colors should be changed to black instead of blue. Text boxes are not symmetrical,make them symmetrical. Layout is good, but there is too much white space around the text.Add an acknowledgements section.
Our fix: We changed the border colors to black,, we removed text boxes entirely, we increased font size and added text as well as more figures, and we added an acknowledgments section at the bottom of the poster.
Comment: Eyes are driven to the first two images and stay there because it’s the most prominent figure and makes it so that the viewer doesn’t want to look at anything else.
Our fix: We changed the color scheme of the color maps so that they blend in more to the other maps in the poster; a more blue and green one.
Comments: The graphs blend into the background too much. Change the layout to 2 x 3 across the poster instead of down the middle.The rounded boxes contrast with the square maps. The boxes are not uniform. Abstract and the top right text in the poster are too text heavy. Change the poster borders to ½ inch or ¾ inch to make things pop more.
Our fixes: We changed the color scheme of the graphs so that they stand out more in the poster. We decided to not change the format of the maps within the poster because we feel that our current format allows for more attention to be drawn to the figures down the center, and that the text on the side is easier and cleaner than text above and below the figures.We entirely took out the boxes. To balance out the text and white space within the poster we re arranged some text and added a few figures so that there is more balance on the outside of the central figures. We changed the border size and are now happier with it.
Comments: Make sure people can read the map keys. The text is too small-get rid of text boxes. Get away from walls of text-utilize bullet points.Draft word in the middle needs to go. Play with the position of north arrow in the bottom two figures so they don’t interfere with the title-put the north arrows off the coast of North Carolina.
Our fixes: The map keys are indeed legible. We increased the size of the text and got rid of text boxes entirely. We cannot decrease the size of the abstract, but we decided to add more figures rather than increase any other areas of text.We felt that bullet points would not effectively convey any of the information we want to display.We took out the word “Draft”. The North arrow has been changed to a compass rose and moved off the coast of North Carolina.
Where are We Now and Where are We Going?
Currently, we have not generated any truly new data products. We have been updating our existing ones so that they would fit on our GIS day poster. This meant doing things like changing the color scheme of our color maps or changing the opacity of our scaling dots in maps where they conflicted with other material displayed. Two products that could be considered new are the inlays for our “Reported UAS Sightings Per City” map, as they add new information. The two maps shown below show the same scaling dot map but include new inlays of airspace borders and major airports that are color coded to the amount of enplanements they have.
 |
| Figure 2: N.Y.C. reported sightings inset with major airports and airspace boundaries |
 |
| Figure 3: L.A. reported sightings inset with major airports and airspace boundaries |
These insets show somewhat of a correlation between the density of major airports, crowded airspace, and the number of reported UAS sightings. New York City and Los Angeles had the two highest amounts of reported sightings, thus they were the best cities for us to use for these insets.
As far as the future of this project, we could potentially explore more correlations between UAS pilots and sightings with the population at city and state level. We will also need to sort through our scaling dot maps, as we have found cities sharing the same name are sharing the same amount of reported sightings or registered pilots. We have attempted to solve this by going into the data and deleting the rows that contain the incorrect data. Unfortunately, our data is table joined with a web layer, so there is no way to fix these errors at any step of the map creation that we have been able to find. Once we are done presenting this poster at GIS day, we will focus much more on our final presentation for our AT 409 class.






































{kind=link}